昆泰芯KTH5763 是一款集成了高度匹配霍尔元件的 3D(XY、XZ、YZ 平面)霍尔角度传感器,集成低功耗,低噪声,高精度零漂运放,高性能,低阻抗 MUX,采用高精度 ADC,转化输出 8Bit 绝对角度数据。芯片提供 I2C通信接口。KTH5763 支持周期循环测量模式和单次测量模式,适用于不同的应用场景。
KTH5763 集成了高效,低功耗 CORDIC 算法模块支持平面的角度输出,支持角度阈值检测。具有高集成度和运用灵活的特点,广泛适用于各种应用场景。
昆泰芯一级代理深圳市绿都电子有限公司,可为您提供销售与技术支持服务,欢迎来电垂询,联络方式:15818779883, zhuoteng@szlvdu.com, 0755-83777479
一、 产品特点
- 集成高度匹配霍尔元件的3D (XY、XZ、YZ平面)霍尔角度传感器
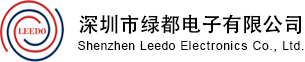
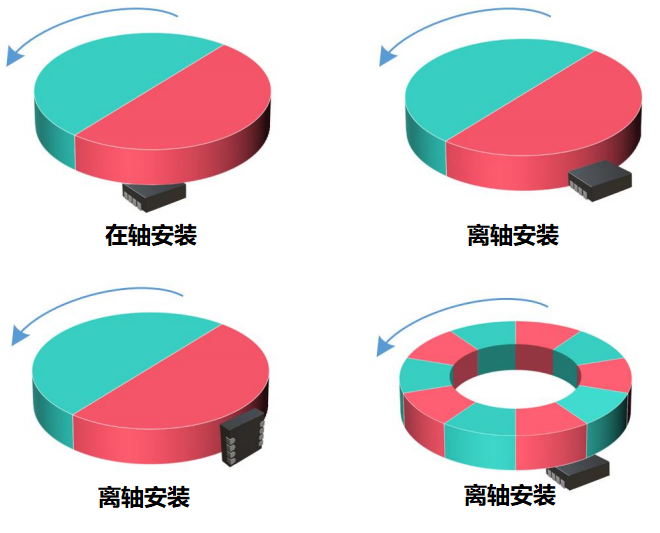
- 支持在轴和离轴安装
- 集成CORDIC算法模块,8bit绝对角度位置输出
- 支持绝对位置检测,角度输出范围高达360度
- 磁感应强度工作范围,XY平面±65mT,XZ/YZ平面±40mT
注1
- 支持标准I2C通信接口
- 支持系统中断唤醒功能
- 工作电压 2.8V ~ 5.5V
- IO供电电压可低至1.8V
- 工作温度 -40℃ ~ +85℃
二、 典型应用
- 电子手表旋钮
三、 功能框图

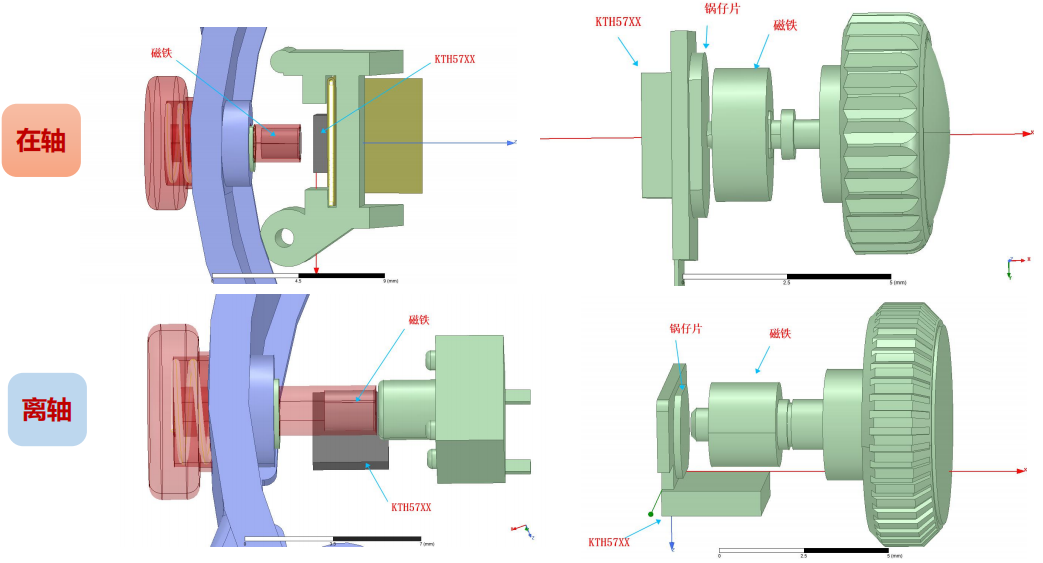
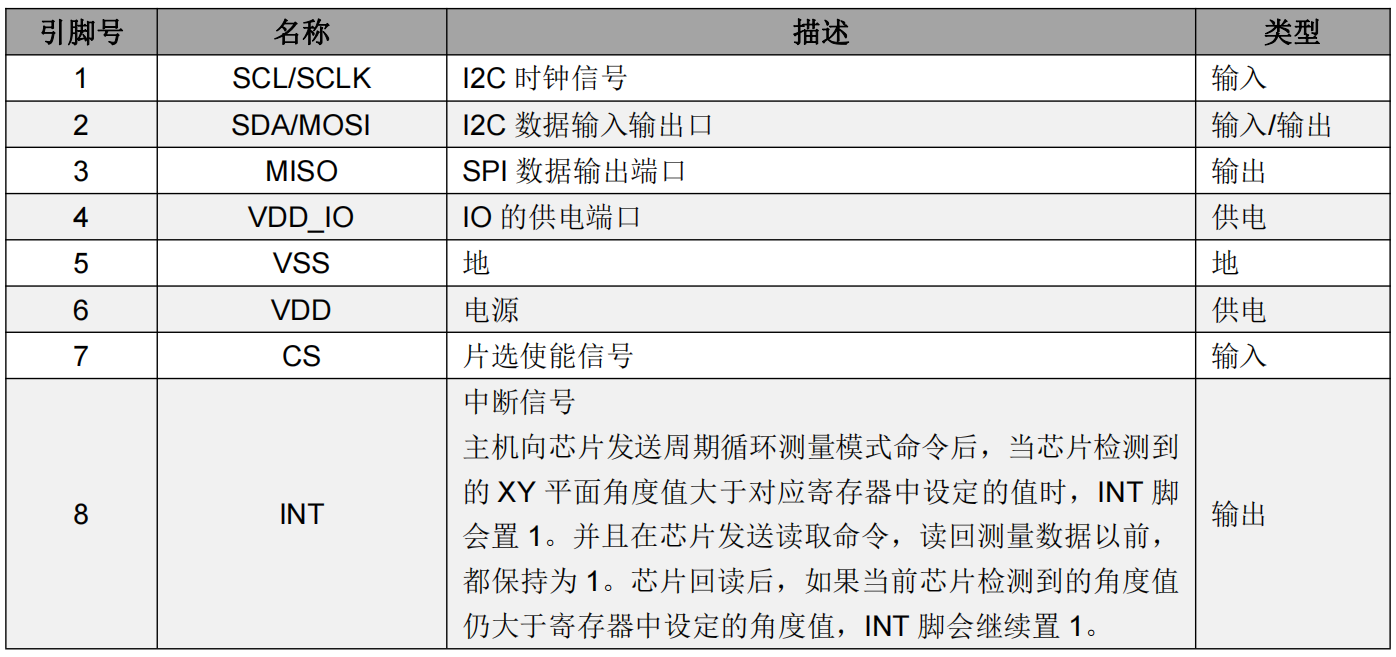
四、 封装与引脚定义
五、 产品规格
注:以下参数均为室温25℃下的测量结果。
5.1 绝对参数
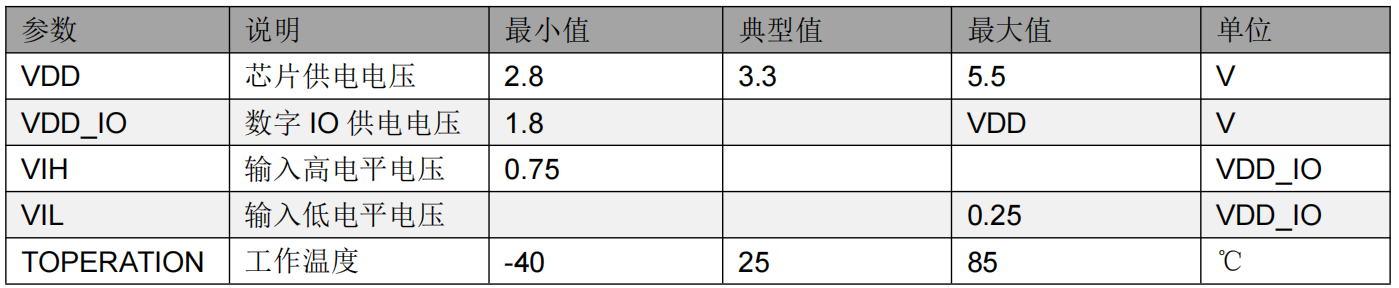
5.2 推荐工作条件
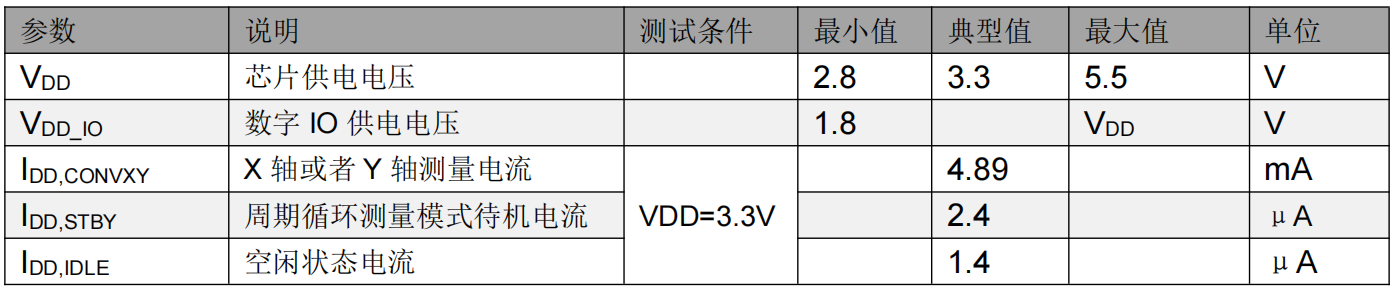
5.3 电气特性
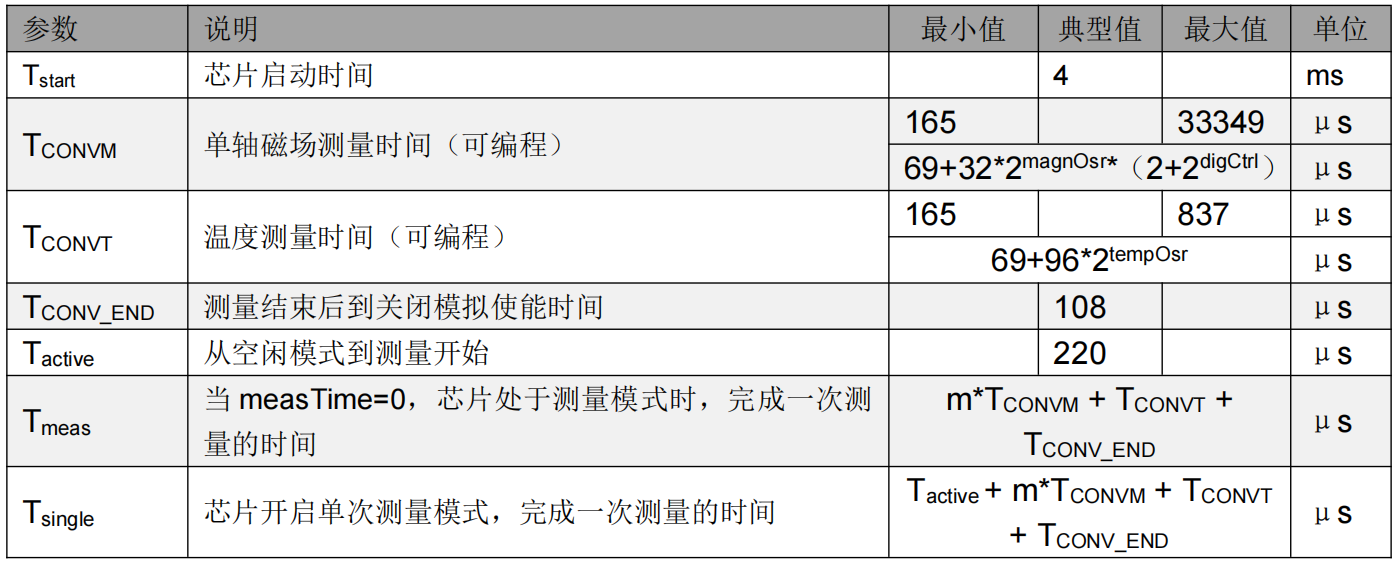
5.4 时间参数
六、 测量模式说明
KTH5763支持多种工作模式,本产品可以在周期循环测量模式,单次测量模式,两种模式下使用。
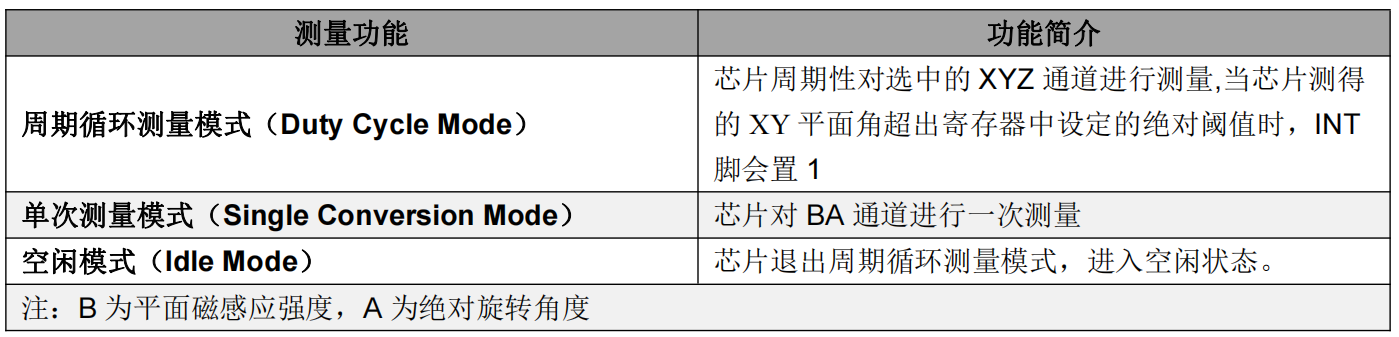
6.1 周期循环测量模式(Duty Cycle Mode)
主机向芯片发送周期循环模式命令后,芯片以一定的频率对测量项(BA)进行测量,直到主机向芯片发送空闲模式命令为止。当芯片检测到的角度值大于对应寄存器中设定的值时,INT 脚会置 1。,并且在芯片发送读取命令,读回测量数据以前,都保持为 1。芯片回读后,如果当前芯片检测到的角度值仍大于寄存器中设定的角度值,INT 脚会继续置 1。该功能只适用于 XY 平面角度测量。在主机通过测量数据回读帧(data Read Frame),一次性将测量数据读回后,INT 脚拉低,否则保持为高电平。芯片 INT 脚不会主动拉低,即某一时刻芯片测量到的角度值超出寄存器中设定的角度值,INT 脚拉高后,如果下一时刻,芯片测量到的角度值减小,低于设定的角度值,但主机没有读回测量数据,INT 脚并不会主动拉低。芯片回读数据后,如果当前芯片检测到的角度值仍大于寄存器中设定的角度值,INT 脚会继续置 1。
6.2 单次测量模式(Single Conversion Mode)
主机向芯片发送单次测量模式的命令后,芯片会对测量项(BA)进行一次测量,并且自动回到空闲状态。
6.3 空闲模式(Idle Mode)
主机向芯片发送空闲模式的命令后,芯片会进入空闲状态。当芯片处于周期循环测量模式(Duty Cycle Mode)时,芯片无法进行测量数据回读帧以外的其他操作,如读写寄存器等。如需要对芯片进行其他操作,需要先发送空闲模式命令,使芯片进入空闲状态。但发送空闲模式命令后,若当前有执行中的测量操作,芯片不会立即进入空闲模式,需要等当前的测量完成后,才能从当前的周期循环测量模式进入空闲状态。如果需要进行其他操作的话,需要等待一次测量时间延时后再进行操作。
注:空闲(Idle)状态指的是芯片不处于任何测量模式下的状态。待机(Standby)状态指的是芯片处于测量模式下,在测量间歇的状态.